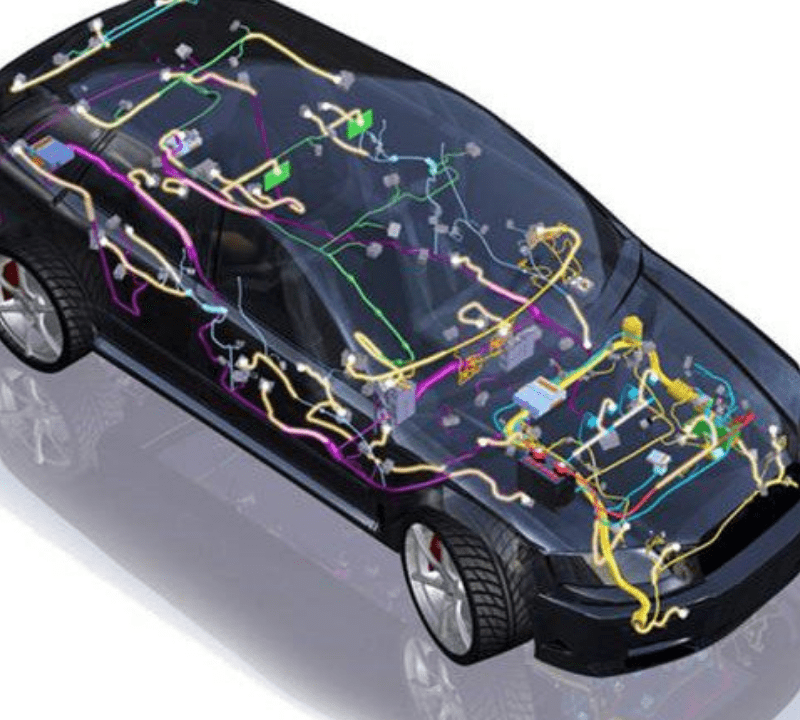


CAN is a hardware and software communication protocol for in-vehicle networks in cars. The applications of CAN in automobiles include engine control communications, body control, and on-board diagnostics. A CAN bus enables microcontrollers in a car to talk to each other without the need for a network host. A typical automobile today has dozens of microcontrollers that communicate with each other via various CAN buses.
Connected Vehicles are those vehicles promise huge benefits, in travel time, safety, entertainment and environment, there are key threats associated with them. Hacking (a third party taking control of the vehicle remotely) is the greatest threat associated with those vehicles. Hacked vehicles could cause significant harm to people and property. purpose of offering connected services like Remote Vehicle Diagnostics, Automatic Crash Response, Automatic Dealer Maintenance Notification etc.
WhatsApp us